
Rennspiele
THE MAKING OF: Stoorm 2.0
Geschrieben von Redakteur
Mit dem Stoorm 1.0 haben wir bereits vor 5 Jahren unsere Fähigkeiten, im Bereich virtuelle Entwicklung für den Automotive Markt, unter Beweis gestellt. Das Release von Unity3D 5.x und unsere Erfahrungen aus vorangegangen Kundenprojekten haben uns dazu bewogen, den Stoorm 2.0 weiter zu entwickeln. Wir nutzen das Projekt für Demonstrationszwecke und um die neuen Features von Unity3D für zukünftige Projekte auszuloten.
Ziel des Projektes ist ein komplexes, frei bedienbares, virtuelles Konzeptfahrzeug und eine große Anzahl an Fahrzeugrelevanten Themen in einem Projekt zu vereinen. Der Stoorm besteht aus vielen Einzelkomponenten. Dieser modulare Aufbau ermöglicht uns beliebige Komponenten (wie Fahrerassistenz-Systeme, Display-Simulationen, kontaktanaloge Head-up- Simulationen) in eine voll funktionsfähige Fahrsimulation einzubetten.
Wir werden neben unserer neue Softwareentwicklung Titan, auch den Stoorm 2.0 erstmals auf der IAA 2015 im vollen Umfang zeigen (17.-27 Sept. 2015, Frankfurt/Main, Halle 4 Stand E11).
Features des Stoorm 2.0
Folgende Themen wurden im Stoorm 2.0 umgesetzt, um ein möglichst realistischen virtuellen Prototypen aufzubauen:
Mit der Fahrsimulations-Komponente ermöglichen wir unter anderem autonomes Fahren und Messung relevanter Daten wie Spurabweichung oder Distanzmessungen zu einem Folge- Fahrzeug. Weiterhin können verschiedene Verkehrs-Situationen generiert werden.
Den notwendigen Fremdverkehr simulieren wir durch ein Multi-Agenten-System, in dem wir jedem Fahrer ein gewisses Verhalten mitgeben können (konservativ vs. aggressiv) oder getriggert bestimmte Aktionen durchführen lassen können.

Weiterhin wurde bei der Entwicklung der Fahrsimulation eine Anbindung ans unsere Software Titan (www.virtence.com/products/titan), geschaffen.
Titan erzeugt Datenbanken anhand realer Daten aus OpenStreetMap (www.openstreetmap.de/) oder beschreibenden Formaten wie OpenDrive (www.opendrive.org). Die Software generiert sowohl die logische Straßenbeschreibung, als auch die Geometrie real existierender Umgebungen. Somit kann der Stoorm in beliebigen virtuellen Landschaften fahren - basierend auf realen Daten. Zusätzlich bietet Titan die Möglichkeit, Navigations-Systeme (inklusive Routen-Findung, etc.) und deren 2D-/3D- Visualisierung umzusetzen - auch in einem realen Fahrzeug.
Fahrerassistenz-Systeme (FAS)
Einer der wichtigen Aspekte beim Simulieren von zukünftigen Fahrzeugen sind Fahrerassistenz-Systeme. Diese sind im Stoorm als eigenständige Module umgesetzt und entsprechend im Gesamtfahrzeug vernetzt. Unter anderem sind im Stoorm 2.0 folgende Fahrerassistenzsysteme implementiert:
• Stauassistent
-
Head-up
-
Autonomes Fahren
-
Umfeld Überwachung
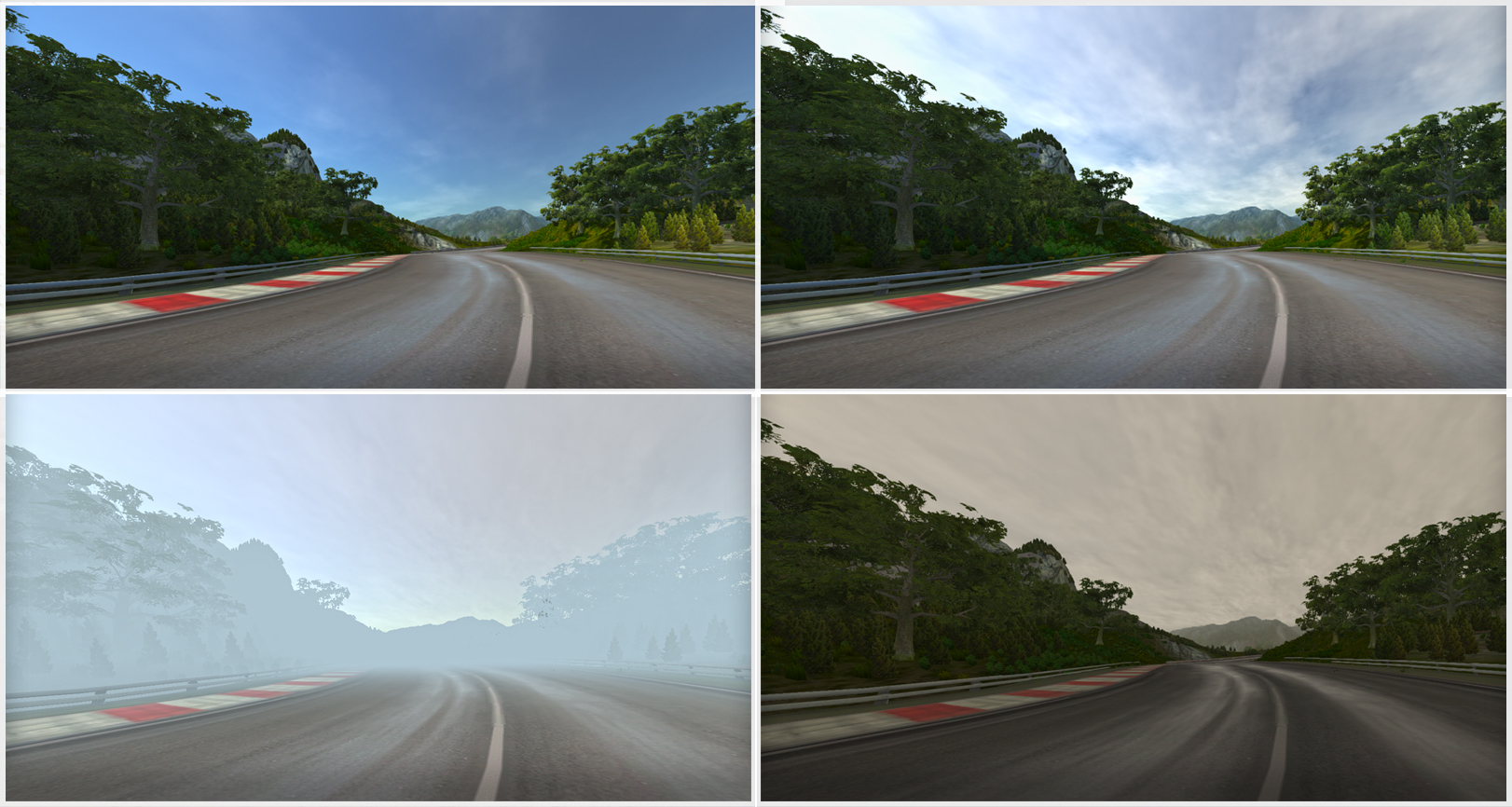
Zusätzlich haben wir ein Umweltsystem in den Stoorm integriert. Es beinhaltet Komponenten für die Steuerung der Tageszeit und ein Wettersystem, welches mittels Partikel-Systemen verschiedene Wettersituationen erzeugen kann. Im Stoorm implementierte Sensoren reagieren auf diese Umweltdaten.
Hardware-Anbindung
Eine Herausforderung bei virtuellen Simulationen ist es, die Erlebbarkeit des Prototypen so realistisch wie möglich zu gestalten. Das Fehlen eines haptischen Feedbacks ist eine der Schwierigkeiten, welche wir durch die Anbindung eines externen Lenkrads, inklusive Gaspedal und Bremse auflösen.
In unseren Projekten ist immer wieder erforderlich, reale Automotive-Bedienteile einzubinden oder Simulationen in reale Fahrzeugen zu integrieren. Beispielhaft haben wir im Stoorm eine Schnittstelle für ein Audi A8 Bedienteil implementiert.
Displayinhalte im Stoom können zusätzlich über Gestensteuerung beeinflusst werden. Hierfür nutzen wir eine Leap Motion. Es sind Gesten wie Swipe, Pinch, Pan und Tip möglich.
Für ein immersives Erlebnis erfolgte die Anbindung einer Oculus Rift.
Head-up-Simulation (HUD)
Head-up-Systeme ermöglichen in einem Fahrzeug die Anzeige von Informationen, ohne dass der Fahrer den Blick von der Straße abwenden muss. Die Informationen werden in die Frontscheibe projiziert.
Dank unserer Erfahrung im diesem Bereich, setzten wir im Stoorm ein komplexes HUD um. Bei der Darstellung kann man zwischen statischen Elementen und sogenannten kontaktanalogen Elementen unterscheiden.
Statische Objekte beinhalten Informationen zur Geschwindigkeit, Entertainment, eingehende Anrufe oder Warnungen.
Hier können zum Beispiel Fahrspuren entsprechend des Navigations-Ziels eingefärbt und interessante Punkte (POI), wie nächste Tankstellen oder Informationen über spezielle Gebäude, dargestellt werden.

Die erforderlichen Geometrien werden mit Hilfe einer zusätzlichen Kamera gerendert und auf einem virtuellen Screen vor dem Stoorm projiziert - passend für die Position des Fahrers.
Display-Simulation
Ein oder mehrere Displays sind in heutigen Fahrzeugen Standard. Die Darstellung der Informationen und die Interaktion des Fahrers oder Beifahrers ist ein wesentlicher Aspekt des Bedienkonzepts. Die dargestellten Informationen lenken den Fahrer unter Umständen von seiner Hauptaufgabe, dem Fahren, ab. Im Automotive-Bereich wird ein enormer Aufwand betrieben, um ein ansprechendes und nicht ablenkendes Bedienkonzept zu entwickeln.

Zahlreiche Kundenprojekte haben uns deutlich gemacht, dass eine klare Trennung zwischen visuellen und logischen Aspekten notwendig ist. Sie ermöglicht uns, zum einen verschiedene Eingabemodalitäten vorzuhalten und auf Konzept- oder Designänderungen umgehend reagieren zu können .Ein weiterer Vorteil ist die unabhängige Nutzung der Displaysimulation für Tischaufbauten, reale Fahrzeuge oder andere virtuellen Prototypen.
Für die Entwicklung der Displaysimulation haben wir uns deshalb für einen Model-View- ViewModel (MVVM) basierten Ansatz entschieden. Die oben genannten Vorteile und eine einfachere Zusammenarbeit im Team brachten uns dazu, dieses Konzept für den kompletten Stoorm zu übernehmen.
Visualisierung
Durch das Release von Unity3D 5.x konnten wir die visuelle Qualität erreichen, die wir uns für eine (Fahr-)Simulation bzw. ein Projekt im Bereich „serious games“ vorgestellt haben.
Das Zusammenspiel der „physical based Shader“, eigener Shader und dem Enlighten-System ermöglicht einen sehr realistischen Eindruck.
Teile des Stoorm 1.0 konnten wir weitestgehend übernehmen. Das UV-Layout wurde komplett überarbeitet, um optimale Ergebnisse beim Lightmapping in Unity3d 5.x zu erzielen.
Im Bereich der Scheinwerfer-Darstellung entwickelten wir ein dynamisches Lichtsystem. Es simuliert unter anderem „Kurven-Licht“ oder „adaptives Fernlicht“.
Der Nutzer kann verschieden Teile des Stoorms durch Varianten austauschen oder deren Farbgebung selbst bestimmen – ohne dabei Interaktionsmöglichkeiten zu verlieren. Derzeit haben wir verschiedene Modelle für das Lenkrad und den Sitz umgesetzt. Die Farben sind für für nahezu jeden Teil des Stoorm frei einstellbar. Somit zeigen wir auch das Potential als Konfigurator, elektronisches Handbuch oder Werbe-Applikation für Verkäufer.
Somit zeigen wir auch das Potential als Konfigurator, elektronisches Handbuch oder Werbe- Applikation für Verkäufer.
Die hier eingesetzten Techniken lassen sich auch in anderen Branchen (Schiffsbau, Haushaltsgeräte, Architektur, Nutzfahrzeuge) nutzen. Jede entwickelte Komponente ist projektunabhängig einsetzbar.
Diese Modularität und das Abdecken nahezu aller Bereiche, macht den Stoorm aus unserer Sicht so besonders. Immerhin kombinieren wir 2D, 3D, reale Hardware, Navigationssysteme und innovative Interaktionsmöglichkeiten wie Leap Motion oder Oculus Rift um schnell umfangreiche, virtuelle Prototypen zu erzeugen – getreu unserem Motto „Simulate your visions.
Previews & Reviews
News
Interviews
Previews & Reviews
Tutorials
![]()
© 2016 Daubit Programmierung Service GmbH
![]()
© 2016 Daubit Programmierung Service GmbH